Blog
Pick & Place-Prozesse sind Automatisierungslösungen, die den Aufbau eines kompletten Automatisierungsprozesses ermöglichen, indem sie z.B. ein optisches Messsystem mit einem Roboterarm erweitern, um Bauteile automatisch aufzunehmen, zu platzieren, zu messen und zu sortieren. Pick & Place basiert in der Regel auf der Interaktion zwischen
1) einem Administrator, der den Automatisierungsprozess vordefiniert,
2) einem kollaborativen Roboter für die Platzierung der Bauteile und, wie in unserem Fall,
3) einem hochauflösenden optischen 3D-Messsystem.

Automatisierte Messlösung Pick & Place mit dem optischen µCMM
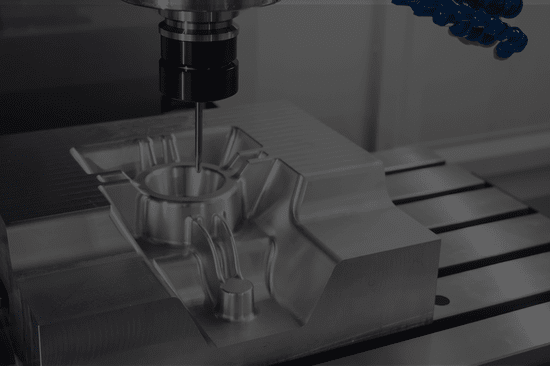
Pick & Place kann auch in Verbindung mit Werkzeugmaschinen eingesetzt werden. Dabei wird das bearbeitete Bauteil vom Roboter aus der Maschine entnommen, in das Messsystem eingespannt und automatisch gemessen. Je nach Fertigungsstrategie kann der Anwender zwischen verschiedenen Möglichkeiten wählen, wie der Produktionsprozess anschließend fortgesetzt werden soll: Entweder wird das Messergebnis nach einer Closed-Loop-Strategie in die Werkzeugmaschine zurückgeführt, wo die Maschinenparameter automatisch korrigiert werden und die Fertigung selbststeuernd weiterläuft. Oder der 3D-Messung folgt eine automatische i.O./n.i.O.-Sortierung zur Weiterverarbeitung.
Möchten Sie sehen, wie das in der Praxis funktioniert? Schauen Sie sich dieses Video an und sehen Sie hier, wie die optische Koordinatenmessmaschine µCMM mit einem kollaborativen Roboterarm erweitert werden kann.
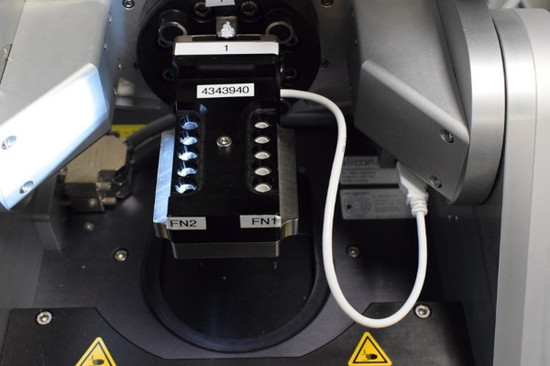
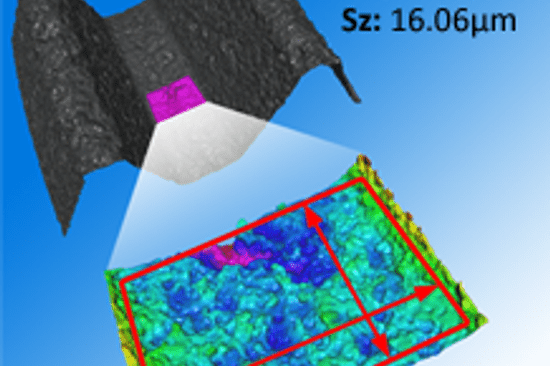
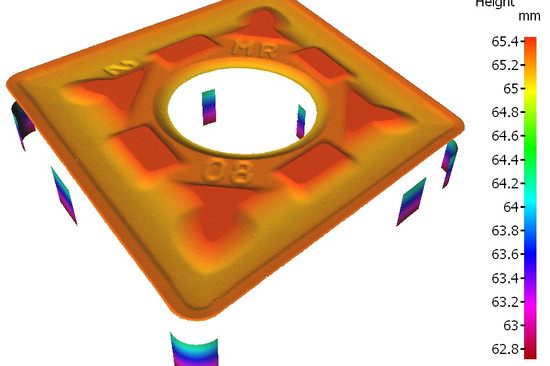
Oder lesen Sie den Messbericht über einen 3-fach Prägeeinsatzes, der mit dem µCMM und einer Real3D Rotationseinheit gemessen wurde.
dieSonne-web-(21)-550x366.jpg "Turbine Blade with Cooling Holes")




dieSonne-(10)-2076x1706-550x366.jpg)
-550x366.jpeg)
die_Sonne-550x366.png "Bruker Alicona at AMB 2024 in Stuttgart")




_Nagel-550x366.jpg)

-1024x576-550x366.jpg)
dieSonne-065-550x366.jpg)

dieSonne-120-550x366.jpg)




dieSonne-137-550x366.jpg)



dieSonne-web-(102)-550x366.jpg)
-550x366.jpg)
dieSonne-(23)-1706x1708-550x366.jpg "So erreichen Sie alle Bereiche Ihrer Schaftwerkzeuge, Dreh- und Stanzteile")
dieSonne-(01)-2277x1706-550x366.jpg "Fertigungsmesstechnik Shopfloor Enclosure FocusX")
