Blog
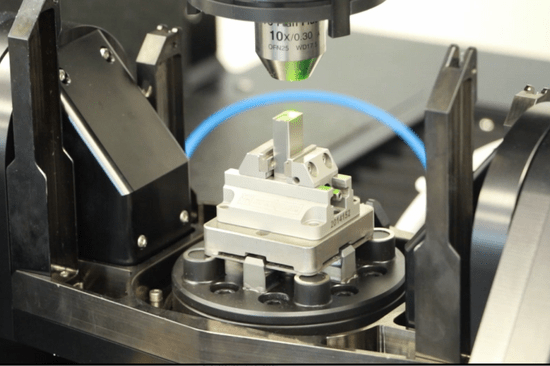
Les processus Pick & Place sont des solutions d'automatisation qui permettent la mise en place d'un processus d'automatisation complet en étendant, par exemple, un système de mesure optique avec un bras robotisé pour prélever, placer, mesurer et trier automatiquement les composants. Le processus Pick & Place est généralement basé sur l'interaction entre 1) un administrateur qui prédéfinit le processus d'automatisation, 2) un robot collaboratif pour le placement des composants et, comme dans notre cas, 3) un système de mesure optique 3D à haute résolution.

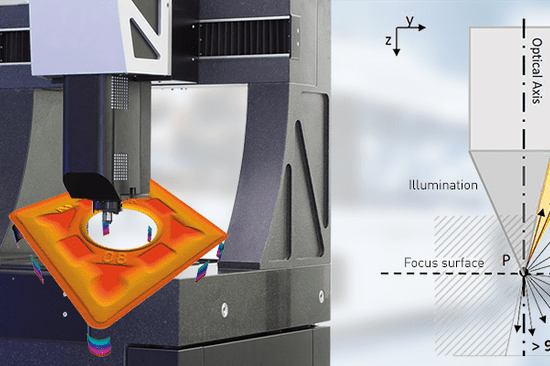
Automated measurement solution Pick & Place with the optical µCMM
Le système Pick & Place peut également être utilisé avec des machines-outils. Dans ce cas, le composant usiné est retiré de la machine par le robot, serré sur le système de mesure et mesuré automatiquement. En fonction de la stratégie de fabrication, les utilisateurs peuvent choisir entre différentes options pour la suite du processus de production : Soit le résultat de la mesure est réinjecté dans la machine-outil selon une stratégie en boucle fermée, où les paramètres de la machine sont corrigés automatiquement et la fabrication se poursuit de manière autocontrôlée. Soit un tri automatique en palettes OK/NOT OK suit la mesure 3D en vue d'un traitement ultérieur.
Vous voulez voir comment cela fonctionne en pratique ? Regardez la vidéo et découvrez comment la machine optique de mesure des coordonnées µCMM peut être complétée par un bras robotique collaboratif.
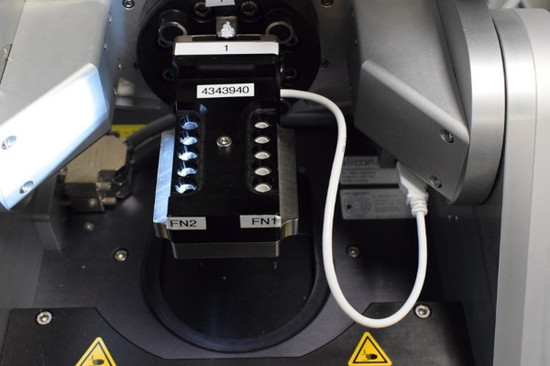
Ou lisez le rapport de mesure d'un insert d'estampage 3-up mesuré avec la µCMM et l'unité de rotation Real3D.
dieSonne-web-(21)-550x366.jpg "Turbine Blade with Cooling Holes")




_Nagel-550x366.jpg)


-550x366.jpg)
dieSonne-065-868x397-550x366.jpg)
dieSonne-120-550x366.jpg)


-550x366.jpeg)

die_Sonne-550x366.png "Bruker Alicona at AMB 2024 in Stuttgart")





dieSonne-(10)-2076x1706-550x366.jpg)

dieSonne-web-(102)-550x366.jpg "Rotation and tilt unit Real3DUnitX")
-550x366.jpg "knee implant measurement")
dieSonne-(23)-1706x1708-550x366.jpg "Key Regions of Turned Parts, Stamped Parts, Round Tools measured")
dieSonne-(01)-2277x1706-550x366.jpg "Production Metrology")
